■梁の計算の基礎(→モーメントの説明)
(1) せん断力F [kgf] と 曲げモーメントM [kgf・mm] (微小要素への作用、右図1)
力の釣合い、 下向き力の合計 = ωdx - F + F +dF = 0 より dF/dx = - ω ---- ①
値の算出には、上式を部材xo~x 間について、上式を積分して (rev.2019-4-12 符号訂正しました +∬→ -∬)
この項は、荷重 ωdξに距離 (x-ξ) を掛けた1次モーメントdM を積分したものである。 右図(b)参照。
従って、図形の図心の定義に対応させることが出来、上式をAx- と置いて、
Ax- = =∫xox ω(x-ξ) dξ= A・x- ここに、面積 A = ∫oξω dξ 図心距離 x- = Ax- / A
ここで、式①'②'を書き直して、 F = Fo - A M = Mo + Fo・x + Ax-
備考
・代表的な面積モーメントAx-を右図に示す。
・この利点は、図形で見る明瞭さ。しかし、図を残す作業より、積分記号を2回書き込む方が簡単。
・集中荷重の場合、分布荷重での積分式に対応できる記述方法を右図に示す。(→ディラックのデルタ関数)
・はりの軸に沿って、 F,M の値の線を 記載したのを せん断力図(SFD)、曲げモーメント図(BMD)と言う。
計算例
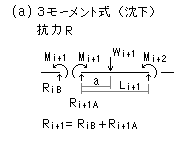
(a)○イ集中荷重、突出しはり、(計算の区間 0~x、及び x=bで M=0 とする)
式①'②'おける∫wdxは、Rとなる。
F = Fo+R = aW/b, M = Mo+ Fo・x + R・x = -W(a+x) + R・x = - Wa(b-x)/b
なお、Fo=-W, Mo = -aW, R= W(a+b)/b この計算は右図○ロの等価計算には便利。
( 区間 -a~x での場合では、 計算は簡単で、x=-a での FoおよびMoはゼロ、
x<0 でF = -W, M = -Wx x>0 で F=R-W, M = -W(a+x) + R・x = - Wa(b-x)/b )
(b)○イ等分布荷重、片持ちはり、対象領域 0~x、∫ωdx=ωx
F = R - ωx = ωz, M = Mo + R・x-ωx2/2 = -ωz2/2, なお、Fo=0, R = ωL, Mo = -ωL,2/2, z = L-x
( この結果は、最初からzについて考えると計算が簡単で、SFD,BMDの際はxで考える。
○ロの場合は、xでの計算が簡単である。但し、最終的に位置の基準点換算は必要 )
(2) たわみの前提条件:
真直梁に純曲げが生じて、断面平面及びその縦繊維との直交性が、
曲げ前と同じく保たれている(ベルヌイナビエの仮説)
ここに ε を歪み[無単位]、Eを縦弾性係数[kgf/mm2]
ひずみ
・歪み ε= λl= h・θρ・θ= hρ------- ④
・断面2次モーメント(定義式) I = ∫Ay2 dA [mm4] ----- ⑤
・断面が受けるモーメントM = ∫Aσy dA [kgf・mm] ----- ⑥
・断面係数(定義式) Z = I/η [mm3] 但し、中立軸から最遠点距離 η [mm] ---- ⑦ (→公式)
・①~⑥にて、 曲げの公式 σ = M / Z [kgf/mm2] ----- ⑧ }(→算出説明)
曲率 1ρ = MEI [1/mm] ----- ⑨
・更に、曲率 1ρ = -dids = -d(tan i)dx did(tan i) dxds = - d2ydx 2 cos3i ≒ - d2ydx 2 ---⑩
の代入による。 (→追加説明)
・方向の符号正負について、応力は圧縮をマイナス、引張りをプラス (引張り応力の増分もプラス)で、
座標は 梁においては 下方をy方向プラスとしている。 従って一般には、曲げ応力の方向の正負は、
y方向に引張りが増となる場合をプラスとする。 即ち、はりを凹湾曲とさせる場合をプラス、凸湾曲と
させる場合をマイナスとしている。 図(2)参照。
たわみ
・撓み角度は、 i = tan-1( dydx ) ≒dydx[rad] で近似する。 ( 8度でも誤差は -0.1% 以下)
| ・式⑦⑧により モーメントと曲率の関係 | d2ydx 2 = - MEI | [mm-1] | これを積分し下記の式が導かれる。 |
・撓み角の式
i = io + ∫xox
-MEIdx
[rad] ------------ ⑪
・撓みの式
y = yo + ∫xoxi dx =
yo + io・(x-xo) + ∫xox
∫xox
-MEIdx dx [mm]
- ⑫
(→2重積分の注意点)
・典型的な例 (右図)
(イ)片持ちはり 集中荷重P [kgf]の場合
固定点x=0で 撓み角i=0 撓みy=0 固定点からxの位置において M = -P・(L-x)
x点での撓み角 i = io + ∫ox P・(L-x)EI dx = P・(Lx - x2/2)/EI
x点での撓み y = yo + ∫ox P・(Lx - x /2)2 EIdx = P・(3L・x2 - x3)/6EI
(ロ)片持ちはり 分布荷重q [kgf/mm] の場合
固定点x=0で 撓み角 i=0 撓みy=0 xの位置において M = -q・(L-x)2/2
x点での撓み角 i = io + ∫ox q・(L-x) /22 EIdx = q・(L2・x - L・x2 + x3/3)/2EI
/24EI
(ハ)両端支持はり 集中荷重P [kgf] の場合
yA = 0 RA = b・P/L M1 = RA・x M2 = -P・(x-a)、 x<aで M = M1 x>aで M = M1+M2
yB = yA+ L・iA + ∫oL ∫ox -M1EIdx dx + ∫aL ∫ax -M2EIdx dx = P・b(-L2 + b2)/6EI
= 0 従って、iA = P・b(L2 - b2)/ 6EIL
x < a で i = P・b(L2 - b2 - 3x2)/ 6EIL y = P・b・x・(L2 - b2 - x2)/ 6EIL
x>a で i = -P・a(L2 - a2 - 3z2)/ 6EIL y = P・a・z・(L2 - a2 - z2)/ 6EIL
(→詳細説明)
(ニ)両端支持はり 分布荷重q [kgf/mm] の場合
yA = 0 RA = L・q/2 M = RA・x - q・x2/2 及び yBは 式⑫で x=Lにて
yB = yA+ L・iA + ∫oL ∫ox -MEIdx dx = L・iA- q・L4/ 24EI = 0 故に、 iA = q・L3/ 24EI
従って、式⑪⑫より i = q・(L3 - 6L・x2 +4x3)/24EI y = q・(L3x - 2L・x3 +x4)/24EI
追加 Date 2007-9-6